


.png)
-

西门子Polarion ALM机器人研发解决方案
价格¥250000-800000
-

四足仿生机器人
价格¥30000~300000
-

具身智能全栈式智能化解决方案
价格¥30000~800000
-

智能代步机器人
价格¥30000~300000
-

MOUENEWT 全域感知移动智能体
价格¥30000~300000
-

火狗四足机器人
价格¥30000~300000

安全碰撞测试:汽车车载IT组件的实际安全评估
本文首先介绍了一些潜在的汽车安全攻击及重要的汽车安全威胁,随后详细阐述了如何基于理论安全分析和实际安全测试

汽车安全威胁分析与风险评估技术及缓解方法
本研究在深入分析汽车行业风险及漏洞评估技术的基础上,旨在完善安全机制。

车载网络CAN(五):从使用和案例中学习CAN总线
本文将通过实例解释实际采用 CAN 时所需的知识和关键点,并提供 CAN 协议的总体概述,以及在实践中考虑 CAN 的设计、开发和采用的基本知识

车载网络CAN(四):CAN控制器的分类和工作原理
本文将主要侧重于硬件相关的主题,但如果您正确理解了这里的内容,那么在实际实施和测试 CAN 时肯定会有所帮助。

车载网络CAN(三):“帧”的结构、用法和错误处理方法
在本系列的第二篇“CAN通信的数据传输机制”中,我们介绍了“数据帧”和“远程帧”,作为CAN(控制器局域网)中数据传输方式的主题

卡内基国际和平基金会11月发布的报告聚焦中国对具身智能的战略布局与实践
摘要:卡内基国际和平基金会 2025 年报告显示,中国将具身智能(AI 驱动、多模态交互的硬件系统)列为长期战略,区别于美西方侧重大型语言模型的路径。其核心目标

Robotnik RB-WATCHER巡检安防机器人AI集成全解析:视觉识别+任务管理双引擎,赋能工业级智能巡检
摘要:Robotnik 旗下 RB-WATCHER 自主移动巡检安防机器人深度集成 AI 视觉识别模块与机器人管理系统(RMS),通过人员检测、热异常识别、基础

MADRA:面向风险感知具身规划的多智能体辩论框架
摘要:本文提出无训练的 MADRA 多智能体辩论风险评估框架,通过集体推理提升具身智能体安全感知;设计分层认知协作规划架构,构建 SafeAware-VH 家庭

Melexis硅基RC缓冲器获利普思选用,携手开启汽车与工业能源管理技术新征程
全球微电子工程公司Melexis宣布,其创新的MLX91299硅基RC缓冲器已被全球先进的功率半导体模块制造商利普思(Leapers)选用,将其集成于新一代功率
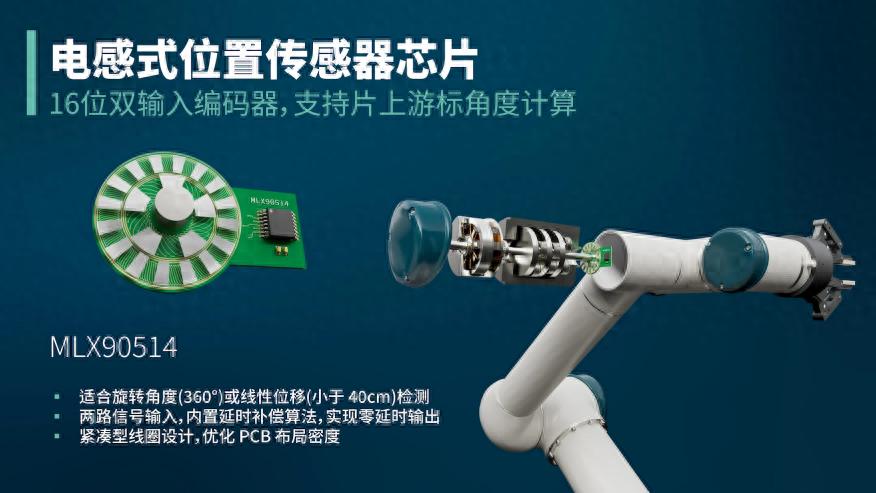
Melexis将微功率技术引入线性霍尔器件,拓展游戏、物联网及工业领域
全球微电子工程公司Melexis宣布,正式推出新型低功耗线性霍尔效应传感器MLX90296。该传感器在100Hz工作频率的功耗低于5µA,并集成数字滤波器,有效

AI驱动的网联自动驾驶汽车网络安全测试方法
本综述旨在研究潜在的人工智能算法,这些算法有望在网联自动驾驶汽车模型的渗透测试中实现类似的运行时间缩短和效率提升

ABB RobotStudio AI助手技术解析:生成式AI重构工业机器人编程范式
ABB Robotics 为旗舰级 RobotStudio 套件集成生成式 AI 助手,基于工业定制化 LLM 与 30 年技术文档库,支持自然语言编程、实时仿真验证与多机器人协同优化,可提升编程效率 30%、缩短调试周期 40%,无需额外付费。

两年3万+缺口!汽车功能安全工程师究竟长什么样?
功能安全工程师的工作内容有哪些专业比较匹配该岗位功能安全工程师岗位如何快速入门功能安全工程师的日常工作协作关系功能安全工程师的发展前景功能安全工程师的上升通道功能安全工程师需要掌握的技能以及工作难点1功能安全工程师的工作内容功能安全工程师主要实在功能安全经理和项目经理的管理和指导下,完成产品功能安全设计、开发和验证。

商用车后桥转向系统技术:原理、设计与安全
本研究将详细探讨这些不同类型的转向机构,包括其具体描述、优缺点及安全考量。
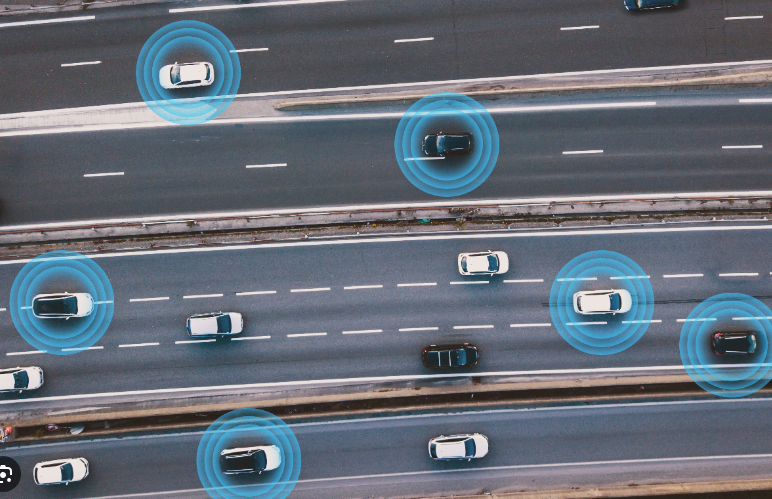
智能交通系统中的传感器技术:分类、互联及应用拓展
本文还讨论了实现全面运行且协同工作的智能交通系统环境所需解决的一些挑战。

瑞萨电子基于R-Car第五代SoC推出端到端多域融合解决方案,加速推动SDV创新
芯片样品、完整评估板及RoX白盒SDK现已上市,将于CES 2026亮相全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布围绕其第五代(Gen 5)R

全球首例跨境通行的Einride无驾驶室电动自动驾驶卡车技术解析:方案核心、对比优势与物流自动化启示
Einride 无驾驶室电动自动驾驶卡车完成挪威瑞典跨境通行,集成 Digitoll 数字海关系统简化清关,依托欧盟 MODI 项目推动 CCAM 落地,助力物流降本增效、减碳,开启行业自动化新纪元。

“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
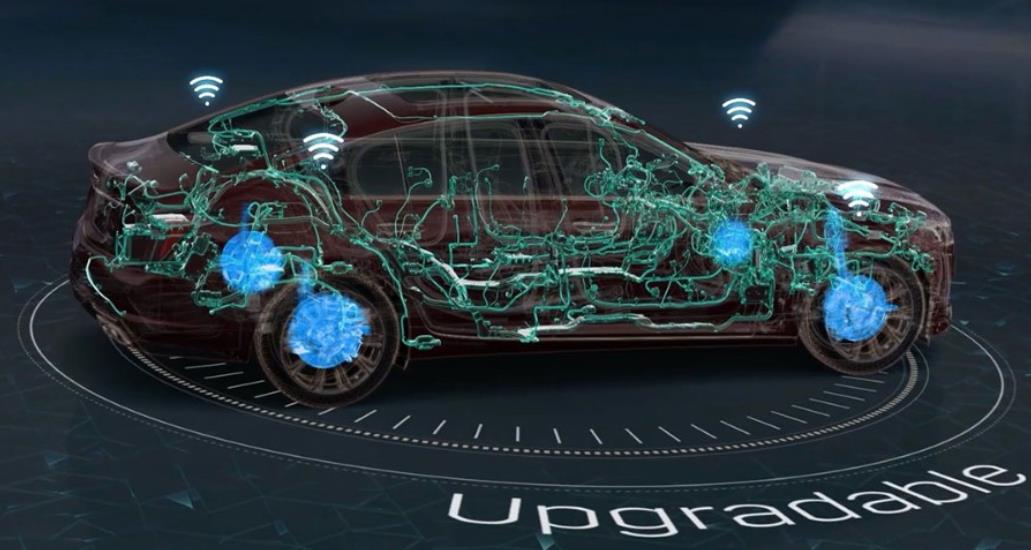
智能网联汽车多域电子电气架构会如何发展?
本文总体车载软件架构设计、硬件系统、通信系统和软件系统四个角度对ICV多域E/E架构研究的关键技术进行了深入分析,并展望了未来的发展趋势。

详解智能座舱通信技术
本文主要介绍了智能座舱通信技术相关内容。

汽车网络安全及相关标准 | 你的智能座驾有多脆弱?
基于简单的案例分析和标准介绍,得出除了车厂必须保证所设计的车辆系统的安全性,还有其他能减少“表面攻击”的工作要做。智能汽车的出现为技术和创新的无限可能性打开了大门,但也为汽车本身以外的威胁打开了大门。

符合AUTOSAR标准的汽车SoC软件架构及其漏洞
漏洞被映射到一个具有代表性的 SoC 软件架构模型,该模型遵循 AUTOSAR 的分层抽象和面向服务原则。

深度强化学习驱动的自动驾驶运动规划:建模方法与场景化应用
本文深入探讨了分层运动规划问题,阐述了深度强化学习的基础。

基于AUTOSAR系统的快速原型开发
本文提出了一种将非 AUTOSAR 兼容的原型代码自动集成到 AUTOSAR 系统中的概念

软硬件解耦驱动下的SDV变革:技术栈升级与安全验证
本文重点指出了当前存在的关键障碍,包括分散的认证框架、标准化工具链的缺失、持续验证支持不足以及软件维护与维修复杂度的不断上升
动态链接驱动的模块化电动车E/E架构云重构方案
本文提出一种混合软件架构,将面向信号的架构(如 CAN 总线)与面向服务的架构相融合
车载雷达的模块化多Chiplet eWLB封装方案
本文展示了首个基于嵌入式晶圆级球栅阵列(eWLB)封装的模块化系统方案

英特尔Panther Lake 18A制程赋能具身智能:重构工业/人形机器人算力,破解能效与场景落地痛点
本文深度解析英特尔 Panther Lake 处理器基于 18A 制程(RibbonFET 晶体管、PowerVia 背侧供电)的技术突破,聚焦其 180 Platform TOPS AI 算力、16 核 CPU/12 Xe 核 GPU 的具身智能适配性能,详解在工业机器人精密装配(0.01mm 级精度、良率升 40%...
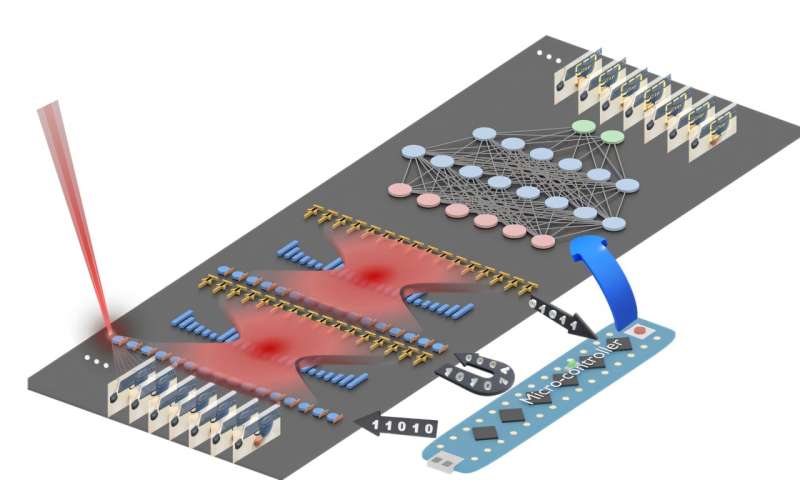
米兰理工团队突破光子神经网络原位训练技术,光驱动计算开启AI能效革命
米兰理工大学团队研发的光子芯片,通过光干涉机制完成数学运算,能耗降低 90%,处理速度提升百倍。原位训练技术无需数字模型,支持自动驾驶、智能传感器等实时场景,助力可持续 AI 发展。
佛罗里达大学硅基光基芯片:菲涅尔透镜赋能AI卷积运算,能效较传统电子芯片提升10-100倍,MNIST分类准确率达98%
当 AI 模型算力需求每 3.5 个月翻倍(OpenAI 数据),数据中心能耗已占全球总电力消耗的 1.5%(国际能源署 2024 报告)。佛罗里达大学 Volker J. Sorger 团队在《Advanced Photonics》(IF=12.3)发表的光基芯片技术,通过 “电 - 光 - 电” 协同架构,将 AI...
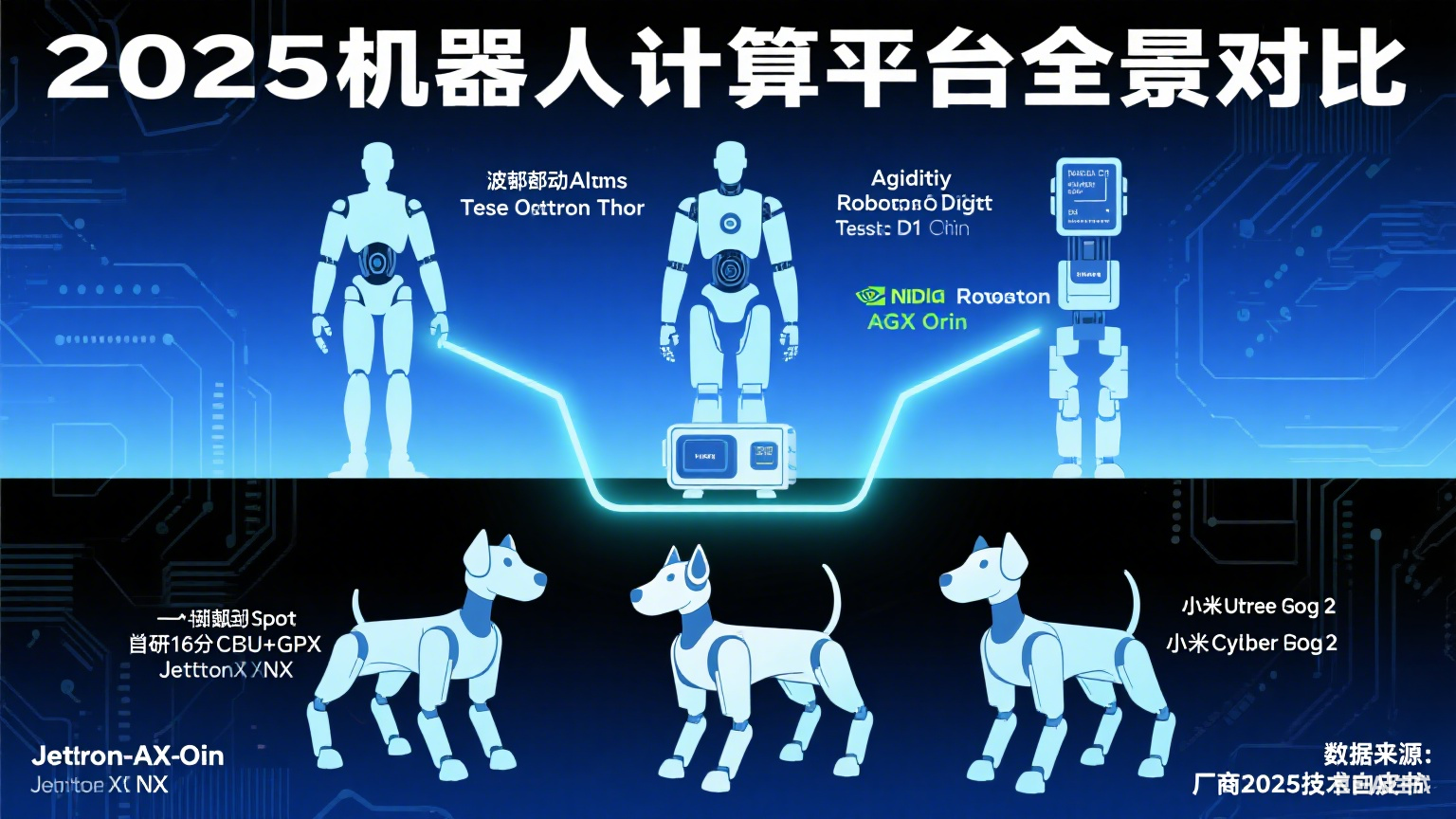
2025 年主流人形机器人与机器狗计算平台全景对比:从技术参数到实战性能
本文将系统梳理当前市场2025年 Top10人形机器人(Atlas/Optimus等)与主流机器狗(Spot/Go1 等)计算平台,对比NVIDIA Jetson Thor、特斯拉D1等方案性能,通过算力输出、能效比、生态适配三大维度,解析不同芯片架构如何支撑机器人在工业、消费、科研等场景的差异化需求。
安全碰撞测试:汽车车载IT组件的实际安全评估
本文首先介绍了一些潜在的汽车安全攻击及重要的汽车安全威胁,随后详细阐述了如何基于理论安全分析和实际安全测试
汽车安全威胁分析与风险评估技术及缓解方法
本研究在深入分析汽车行业风险及漏洞评估技术的基础上,旨在完善安全机制。

数据驱动的汽车传感器退化及影响分析
本文旨在提高人们对汽车传感器退化问题的认识
自动驾驶车辆规避碰撞避障的安全验证
本文提出了一种新的自动驾驶车辆规避最小风险机动功能安全验证方法。


低空物流如何重塑城市配送?闪送×杭州商业试点落地,四大核心模块拆解 “空中物流” 架构
闪送(BingEx,纳斯达克:FLX)联合杭州市及本地企业启动城市级低空物流网络商业试点,依托 11 年运营经验、覆盖 297 城的全国网络及数亿用户数据,以 “基础设施 + 需求整合 + 运力供给 + 运营管理” 四大核心模块,构建高效安全的智能无人机配送体系,首批航线保持零事故记录。项目目标 2025 年建成杭州全...
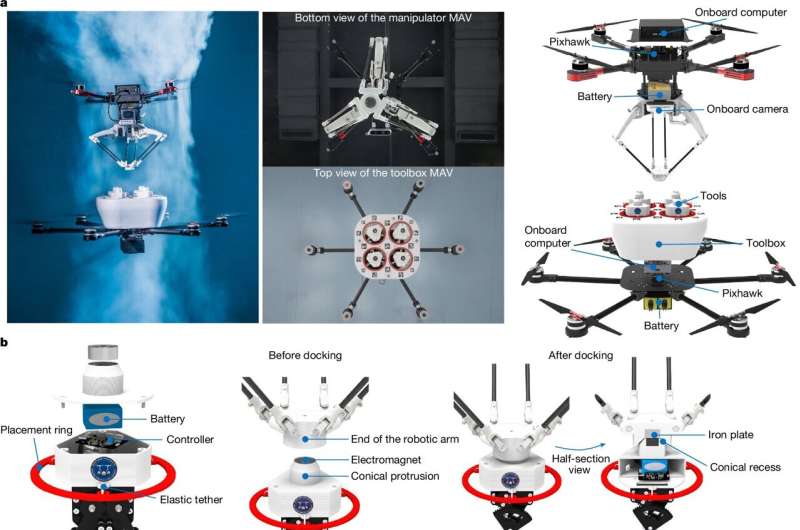
中国西湖大学FlyingToolbox深度解析:攻克下洗流难题,实现亚厘米级空中工具交换,赋能高危作业革新
西湖大学 FlyingToolbox 无人机系统登《Nature》,攻克下洗流干扰难题,空中工具交换达 0.80±0.33cm 亚厘米精度(超同类 6-8cm 水平),为工业维护等场景提供方案,待突破户外应用瓶颈。

SORA-DET轻量化框架深度解析:赋能无人机遥感目标检测,高精度与快速推理双重突破
大阪都市大学 SORA-DET 轻量化框架深度解析:专为无人机(UAV)遥感目标检测设计,通过部分重参数化卷积块(PRepConvBlock)实现 FLOPs 降低 32%、感受野提升 114%,浅层双向特征金字塔网络(SB-FPN)解决多尺度目标漏检,4 个检测头适配遥感幂律分布目标。性能实测:VisDrone201...

西湖大学FlyingToolbox垂直堆叠协同无人机系统全面解析:破解 “近距干扰” 难题的空中协同新范式
西湖大学赵世钰团队《自然》发文的 FlyingToolbox 垂直堆叠无人机系统,突破 13.18m/s 下洗气流干扰,实现 0.8cm 级精准对接,可用于电力巡检、应急救援、航天在轨维护,破解近距操作悖论。
丹麦DTU研发3D螺旋形固体氧化物电池SOC:比功率超1瓦/克,重量较传统降87%,极端工况稳定,破局航空航天可持续能源
丹麦DTU研发3D打印螺旋形固体氧化物电池(SOCs),比功率超1瓦/克,重量较传统降87%,极端工况稳定,可重塑航空航天/深空探测能源应用,推动零碳飞行与绿氢储能发展。
车载网络CAN(五):从使用和案例中学习CAN总线
本文将通过实例解释实际采用 CAN 时所需的知识和关键点,并提供 CAN 协议的总体概述,以及在实践中考虑 CAN 的设计、开发和采用的基本知识
车载网络CAN(四):CAN控制器的分类和工作原理
本文将主要侧重于硬件相关的主题,但如果您正确理解了这里的内容,那么在实际实施和测试 CAN 时肯定会有所帮助。
车载网络CAN(三):“帧”的结构、用法和错误处理方法
在本系列的第二篇“CAN通信的数据传输机制”中,我们介绍了“数据帧”和“远程帧”,作为CAN(控制器局域网)中数据传输方式的主题

车载网络CAN(二):CAN通信的数据传输机制
该专题连载共分为“五”篇,这是第二篇。本文的主题是CAN(控制器局域网)中的数据传输机制。让我们先来看看通信的基本单元——“帧”,这对于理解CAN通信至关重要。

车载网络CAN(一):CAN协议基础知识
我们将对车载网络中使用的标准“CAN(控制器局域网)”进行更详细的解释。




- 2025-06-19 牛喀直播间
- 2024-07-14 上海市静安区
- 2023-07-13 上海市徐汇区
- 2024-06-10 上海市闵行区
- 2024-12-28 牛喀直播间
- 2023-11-23 上海市静安区