
技术
“技术能力”栏目力争向读者介绍行业内的基础性技术知识及新兴关键性和富有竞争性的专业技术,也欢迎广大技术专家不吝赐稿。

两年3万+缺口!汽车功能安全工程师究竟长什么样?
功能安全工程师的工作内容有哪些专业比较匹配该岗位功能安全工程师岗位如何快速入门功能安全工程师的日常工作协作关系功能安全工程师的发展前景功能安全工程师的上升通道功能安全工程师需要掌握的技能以及工作难点1功能安全工程师的工作内容功能安全工程师主要实在功能安全经理和项目经理的管理和指导下,完成产品功能安全
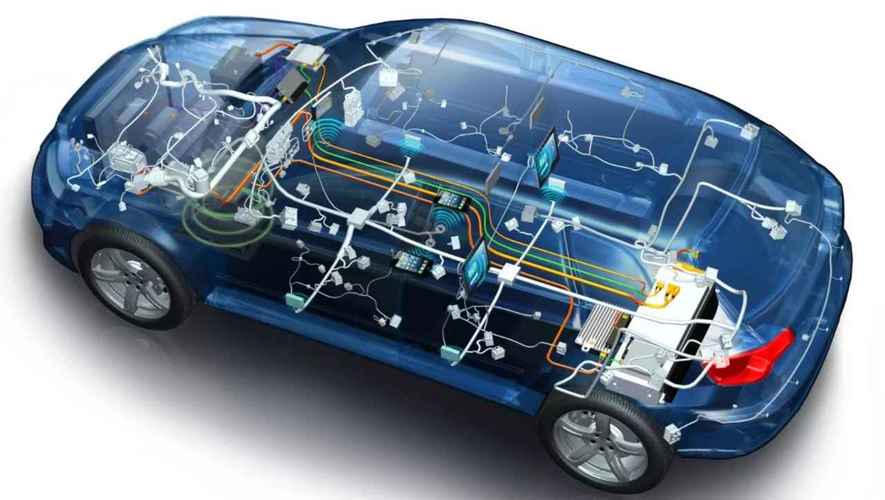
符合ISO26262功能安全标准评估的自动驾驶汽车下一代配电系统拓扑方案的设计
本文阐述了根据ISO 26262评估有关功能安全方面最先进的配电系统--下一代车辆配电系统架构在故障后保持供电的方法。由于市场趋势以及当前配电系统和开发过程中的差距,功能安全需求不断提高。文章指出,为什么这些流程不再适用于未来的配电系统。通过介绍电动助力转向(EPS)系统的影响来说明这些挑战。此外,
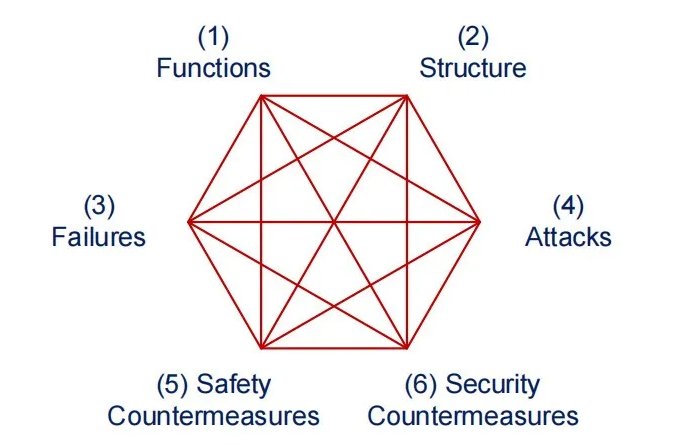
整合自动驾驶车辆的功能安全与网络安全分析:运用STPA方法和六步模型
功能安全和网络安全是自动驾驶汽车的两个相互依赖的关键属性,旨在保护车辆免受意外故障(功能安全)和蓄意攻击(网络安全),这可能导致人身伤害和生命损失。自动驾驶汽车功能安全和网络安全对策的选择取决于国际标准SAE J3016定义的驾驶自动化水平。然而,当前的车辆安全标准ISO 26262并未考虑驾驶自动
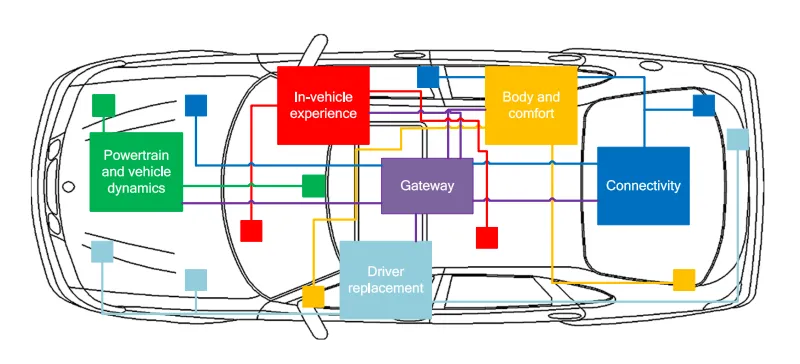
汽车架构拓扑:自动驾驶安全相关应用分析
安全关键系统(如高级驾驶辅助系统和自动驾驶车辆)需要冗余,以保证在发生故障后仍能够正确运行。在具有高数据速率和处理要求的系统中引入冗余也会对架构设计决策产生重大影响。目前的自动驾驶车辆原型没有使用标准化的系统架构,而是基于现有车辆和可用部件进行设计。在这项工作中,我们提供了一种新的分析框架,使我们能

智能驾驶功能软件平台设计规范
本文介绍智能驾驶功能软件平台设计规范,包括智能驾驶功能软件平台的系统架构、功能模块和算法组成划分。

整车智驾域的网络管理
本文对担负着减少整车能量消耗的网络管理进行介绍。
汽车视觉功能安全设计开发过程
如何用功能安全的思想去指导系统开发,减少和避免系统的设计缺陷,改善项目开发的效率,降低开发成本,尝试找到可操作可重用的方法(Best Practice)。
自动驾驶软件架构之中间件与SOA介绍
软件架构方法论及SOA推导SOA是什么?更专业的说法,SOA是一种软件架构风格。车载中间件产品也会有其软件架构及架构风格,SOA 目前看来会是一个主流的趋势。什

自动驾驶汽车整体架构(整理)
概述自动驾驶汽车的整体架构涉及多个组成部分和技术,包括感知系统、决策与规划系统、控制系统和用户界面。下面是对每个组成部分的概述:1.感知系统:自动驾驶汽车通过感

【功能安全】HILS故障诊断功能测试(三)
在此专题的最后一个篇章“连载三”中,我们将介绍执行器故障中喷油器和节气门执行器的测试。尽管这可能不是很常见,但我们想展示一个如何使用HILS检测执行器故障的示例。

【功能安全】HILS故障诊断功能测试(二)
此篇章“连载二”中,我们将介绍节气门位置传感器和旋转传感器故障的测试。

【功能安全】HILS故障诊断功能测试(一)
此篇章为“连载一”,我们将使用HILS来测试ECU,并将介绍系统组成设备的故障和故障时的安全功能等诊断功能的测试。
【功能安全】使用电磁故障注入开展汽车芯片安全测试
这项工作将着眼于一个典型的汽车产品示例,该示例面临安全关键设计失效的担忧。

【汽车安全】车辆可预测安全性:基于感知的碰撞严重度预测函数的验证策略
在本文中,作者详细阐述了创新碰撞严重程度预测和预碰撞系统的安全潜力和风险。在ISO 26262和ISO/PAS 21448标准的背景下,提出了一种新颖的碰撞严重程度预测功能验证策略。使用潜在的碰撞前用例证明了可靠且精确的实时碰撞严重程度预测功能的相关性。

【汽车安全】高级自动驾驶车辆功能安全和网络安全管理的接口
本文提出了一套工程风险管理框架。随后,介绍功能安全和网络安全领域之间的接口区域是本文的重点领域之一,并用示例性交互模板表示接口管理活动。

【汽车安全】安全驱动的汽车功能架构开发
所提出的方法通过从一开始就将网络安全和功能安全视为基本的架构驱动因素来满足这种行动需求。它显示了功能体系结构开发中的网络安全和功能安全要求,以及具体的风险缓解措施。

【SOTIF】自动驾驶环境感知局限性的系统建模方法
我们提出了一种新颖的方法来模拟场景中的触发条件和性能限制,以评估SOTIF。

【功能安全】自动驾驶功能设计过程中的功能安全概念生成
本文描述了aFAS项目中无人应急车辆开发概念阶段中功能安全概念的系统创建和表示。早期设计的不同阶段以及它们之间的依赖关系通过创建和使用的工作产品来表示,并介绍了SAE 4级应用程序的功能安全要求和安全论证结构。

【SOTIF】STPA在高速公路自动驾驶系统安全设计中的应用
本文提供了在SOTIF背景下使用STPA(系统理论过程分析)实现客车高速公路自动驾驶功能的简化示例。
【功能安全】ISO 26262在SEooC上的系统化应用
在本文中,我们介绍了将ISO 26262中的SEooC概念应用于电子停车系统的经验。我们描述了一种系统方法,该方法考虑了在整个车辆环境中安全重用系统元素的需求。

【SOTIF】如何减少基于场景的自动驾驶安全分析的工作量
在本文中,我们提出了基于依赖关系的组合方法(DBCA),以减少识别自动驾驶车辆运行环境中的各种运行环境和场景的各种实例的工作量。DBCA利用组合算法IPOG生成ODD元素的t路组合来生成代表运行环境的组合,以及属性(或参数)的p路组合。
【SOTIF】解决自动驾驶汽车中的未知场景:类型和观点
在本文中,我们从分析师和工程师、自动驾驶车辆和机器学习(ML)模型这三个不同角度讨论不同类型的未知数。我们还澄清了每个视角中经常混淆的未知已知和未知未知的概念。通过一个正在运行的例子,我们展示了如何从不同角度考虑未知因素,从而有助于设计安全的自动驾驶汽车。
【SOTIF】自动驾驶系统SOTIF的量化验证分析
本文研究ISO 21448中的术语风险框架以及SOTIF验证的相关规范和信息,批判性地讨论内容不足以实施合规的定量SOTIF验证方法,以及提出建设性的改进建议。

【SOTIF】基于场景的自动驾驶汽车预期功能安全评估框架
自动驾驶汽车(AV)有望通过实现灵活的按需移动来提高交通安全和交通效率等。但是需要正式的自动驾驶道路审批程序。为此,我们提出了一种安全评估框架,该框架将标准化功能安全设计方法与基于交通场景的方法相结合。后者涉及使用驾驶数据来提取与AV相关的交通场景。底层方法基于将场景分解为基本事件、随后的场景参数化
REANA新版本升级!新增AI自动化、批量操作功能、运行更稳定!
更直观了解REANA 23R1的全新特性!REANA新版本升级!新增AI自动化、批量操作功能、运行更稳定!

基于ISO/PAS 21448标准的自动驾驶编队行驶车辆安全策略
在本文中,通过ISO/PAS 21448标准涵盖的场景,介绍了一种克服编队行驶中可能发生的意外情况的方法。特别是利用编队运行模拟器VENTOS,确认了本文提出的方法可以达到安全编队运行的目标。

牛喀学城新一期ISO 26262功能安全工程师资质培训圆满结束
为期3天的汽车功能安全线下精品培训班也于2023年9月1日—3日在上海取得了圆满结束。培训达到了预期的效果,得到学员们的好评。

新能源车企2023“半年考”放榜,且看成绩如何?
2023年已在持续阵痛中过半,当然不论困难怎样,也不管之前各大新能源车企每月的战报如何,年中是时候交出“半年考”成绩了。

牛喀学城功能安全工程师认证培训线下精品班圆满结束
2023年6月2日- 4日,牛喀学城在上海开展为期三天的“ISO 26262功能安全工程师资质培训”线下精品班取得了圆满结束。
使用符合ISO 26262的STPA为全自动驾驶车辆开发安全架构
在本文中,我们提出了一个关于如何使用STPA来扩展ISO 26262的安全范围并支持危害分析和风险评估(HARA)流程的概念。

“蔚小理”大PK,谁是亏损王?谁最敢花钱?谁将先“上岸”?
本文将结合财报数据分析揭晓常年亏损的“蔚小理”三家“难兄难弟”,谁是“营收王”?谁是“亏损王”?谁最敢“花钱”?谁将最“危险”?谁又将率先盈利“上岸”?

汽车EBSE测试流程分析(五):评估并反思EBSE过程
本篇章具体阐述EBSE步骤四,评估和反思EBSE过程。

汽车EBSE测试流程分析(四):反思证据及当前问题解决
此文为该连载系列的“第四”篇章,在之前的“篇章(三)”中已经结合具体研究实践阐述了“步骤二,通过系统调研确定改进方案”等内容。那么,在本篇章(四)中,我们将详细分析EBSE步骤三:批判性地反思证据以及当前问题解决。

汽车EBSE测试流程分析(三):通过系统调研确定改进方案
内容提要:此文为该连载系列的“第三”篇章,在之前的“篇章(二)”中已经分析了EBSE步骤一:关于优势和挑战的案例研究。在本篇章(三)中,我们将结合具体研究实践,详细阐述“EBSE步骤二,通过系统调研确定改进方案”等内容。EBSE专题连载共分为“五个”篇章。此文为该连载系列的“第三”篇章,在之前的“篇
汽车EBSE测试流程分析(二):关于优势和挑战的案例分析
此文为该连载系列的“第二”篇章,在之前的“篇章(一)”中已经阐述了汽车软件工程的特点,以及使用混合方法设计的分阶段EBSE测试过程,并提出问题。接下来,我们将具体分析EBSE步骤一:关于优势和挑战的案例分析。

汽车EBSE测试流程分析(一):汽车软件测试的特征和问题
此文为该连载系列的“第一”篇章,阐述了汽车软件工程的特点,并具体分析了使用混合方法设计的分阶段基于证据的测试过程以及每个步骤中提出的研究问题。
适用于高级别自动驾驶的驾驶员可预见误用仿真测试
本文概述了SOTIF标准中描述的SOTIF相关误用场景以及可预见误用(FM)的概念,并演示了为实现由系统启动的HD和系统之间的切换而产生的基于仿真的FM测试策略示例。

全球自动驾驶竞争力最新排行榜,4家中国企业上榜
内容提要:自动驾驶企业的竞争力不仅仅依赖于技术实力,还包括市场部署、品牌影响力、资金、合作伙伴等诸多方面的综合实力。Guidehouse Insights推出了全球自动驾驶企业竞争力最新排行榜(2023)。发展至今,自动驾驶技术不仅是汽车行业的一个主战场,更是全球科技领域中备受关注和充满竞争的一个重
使用SOTIF提升自动驾驶物流机器人的安全性
在本文中,我们根据制定的ISO/DIS 21448 SOTIF标准,应用了仅针对汽车开发的SOTIF标准的过程和方法,考虑到室内和室外物流自动驾驶机器人,这将是一个类似于完全自动驾驶汽车的概念。

无人驾驶系统ISO 26262和ISO 21448开发流程的融合
在本文中,我们提出了ISO 26262和ISO 21448之间的详细工作流程,展示了哪些阶段需要协调一致。我们还讨论了确保解决SOTIF问题的设计更改不会导致新的FuSa问题的必要性,反之亦然。我们通过一个示例架构讨论了工作流,该架构具有对驱动、制动和转向执行器的自动控制功能。
融合功能安全和SOTIF的开发活动实践案例
本文的主要贡献是通用安全生命周期,整合了功能安全和预期功能的安全生命周期。显示了WP之间的需求分布。引入了用于存储有关预期功能的非项目特定数据的单独数据库的概念。两个生命周期的集成使SOTIF更清晰,更易于实施。
2022年“成绩单”:新能源汽车月度及年度销量榜单,冠军花落谁家?
近日,各大新能源车企相继公布了去年12月份的销售数据,如此,2022年新能源车企在中国市场的全年业绩也就和盘托出了。

基于ISO 21448和STPA方法的自动驾驶安全性和可靠性设计
功能安全分析包括FTA(故障树分析)、FMEA(故障模式和影响分析)和HAZOP(危害和可操作性)。这些分析在处理由复杂的相互关系引起的故障或错误方面存在局限性,因为它假设影响风险的故障或错误是由特定组件引起的。为了克服这个限制,有必要应用STPA(系统理论过程分析)技术。

综合FuSa和SOTIF的无人驾驶扩展HARA分析方法
我们提出了一种融合FuSa和SOTIF的扩展HARA。特别的,我们考虑了(a)功能场景表示和场景选择(例如在HARA中描绘基本场景和事故场景)和(b)为每个HAD功能同时找到FuSa和SOTIF的关系和交互的方法。此外,我们通过在应用案例(横向导航辅助系统)中执行该过程来演示基于场景的扩展HARA方

基于规则手册的自动驾驶预期功能安全性开发(下):应用案例
在上部分中我们已经了解了规则手册和SOTIF之间的链接等具体方法内容。在本文中我们将针对规则手册在SOTIF流程中的具体应用案例及结论进行分析。

基于规则手册的自动驾驶预期功能安全性开发(上):SOTIF规则手册
本专题连载提出了规则手册框架和SOTIF流程之间的链接。我们确定了提供自动驾驶汽车路径规划任务的功能描述,并讨论了该方法在确认和验证上的应用。此文为该连载系列的“上”部分,从规则手册原则、规则手册和SOTIF之间的链接等方面进行具体方法的阐述。

牛喀学城代表团拜访欧亚科学院中国云计算中心、中国科学院云计算研究院、清华大学创新中心
牛喀学城代表团先后拜访了欧亚科学院中国云计算中心、中国科学院云计算研究院、清华大学创新中心,并与各中心/研究院相关负责人进行了深入沟通交流及合作探讨。

自动驾驶哪家强?全球自动驾驶竞争力排行分析
那么全球范围内自动驾驶技术究竟哪家强?针对这一热议话题,本文结合相关权威机构的调研作了分析。

使用符合ASIL标准的IP加速汽车安全认证
为了减轻驾驶车辆时一些固有的人为错误,当今的汽车拥有多种驾驶员辅助技术,包括前方碰撞警告、自动紧急制动、车道监控和盲点检测安全功能。所有这些系统都建立在半导体组件之上,这些组件通常包括多个IP内核,以及执行软件的嵌入式处理器或微型计算机。

