
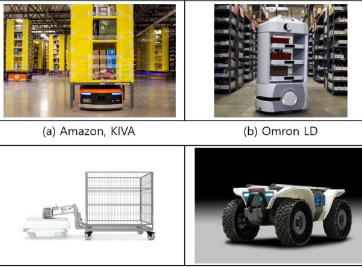
使用SOTIF提升自动驾驶物流机器人的安全性
在本文中,我们根据制定的ISO/DIS 21448 SOTIF标准,应用了仅针对汽车开发的SOTIF标准的过程和方法,考虑到室内和室外物流自动驾驶机器人,这将是一个类似于完全自动驾驶汽车的概念。...

【视频】汽车硬件功能安全和FMEDA(下)
概述:1、定量分析的三个指标;2、定量分析方法...

网络安全版来了!汽车安全设计全覆盖,REANA惊艳升级等你来体验
观看新版升级介绍视频,全面了解REANA 22R2的实用性!REANA软件是一款致力于打造纯粹的由模型驱动的功能安全、信息安全及预期功能安全的工具类软件。...

【视频】汽车硬件功能安全和FMEDA(中)
概述:什么叫硬件随机失效...

【视频】汽车硬件功能安全和FMEDA(上)
概述:26262在硬件设计方面的基本要求...

无人驾驶系统ISO 26262和ISO 21448开发流程的融合
在本文中,我们提出了ISO 26262和ISO 21448之间的详细工作流程,展示了哪些阶段需要协调一致。我们还讨论了确保解决SOTIF问题的设计更改不会导致新的FuSa问题的必要性,反之亦然。我们通过一个示例架构讨论了工作流,该架构具有对驱动、制动和转向执行器的自动控制功能。...
【视频】整车级功能安全介绍(下)——FTTI及功能安全概念设计
概述:1、FTTI;2、功能安全概念设计;3、整车级功能安全需求的分解编辑:牛小喀牛喀网视频,未经授权不得转载!...
融合功能安全和SOTIF的开发活动实践案例
本文的主要贡献是通用安全生命周期,整合了功能安全和预期功能的安全生命周期。显示了WP之间的需求分布。引入了用于存储有关预期功能的非项目特定数据的单独数据库的概念。两个生命周期的集成使SOTIF更清晰,更易于实施。...
【视频】整车级功能安全介绍(中)——危害分析和风险评估(HARA)
1、危害事件的ASIL;2、安全目标的定义—功能级的描述、整车级的功能...

【视频】整车级功能安全介绍(上)——相关项定义
1、说一说Item Definition之前的BUG;2、Item Definition是整车功能,可以跨ECU,子系统...

综合FuSa和SOTIF的无人驾驶扩展HARA分析方法
我们提出了一种融合FuSa和SOTIF的扩展HARA。特别的,我们考虑了(a)功能场景表示和场景选择(例如在HARA中描绘基本场景和事故场景)和(b)为每个HAD功能同时找到FuSa和SOTIF的关系和交互的方法。此外,我们通过在应用案例(横向导航辅助系统)中执行该过程来演示基于场景的扩展HARA方...
【视频】功能安全设计基本方法论概要(下)
概述:1、ASIL等级的基本概念;2、从需求推到的设计...
【视频】功能安全设计基本方法论概要(上)
概述:1、流程、主动技术手段、被动技术手段;2、冗余设计、监控/诊断设计、对应硬件随机失效的诊断覆盖率的概念...

【视频】ISO 26262 简介(下)
概述:ISO 26262 本质就是一份Check list,定义了要做什么,以及怎么做...
【视频】ISO 26262 简介(上)
概述: ISO 26262 覆盖了IEC 61058对乘用车的要求...

