

自动驾驶功能安全和SOTIF混合分析框架(中):HCL开发阶段和方法
内容提要:此文为该连载系列的“中”部分,具体对自动驾驶汽车HCL模型和开发方法进行解析,含括ESD分析的概念阶段、具有FTA/BN分析的系统和产品阶段等方面的内容。
概述
《自动驾驶功能安全和SOTIF混合分析框架》专题连载共分为“上、中、下”三个部分。此文为该连载系列的“中”部分,具体对自动驾驶汽车HCL模型和开发方法进行解析,含括ESD分析的概念阶段、具有FTA/BN分析的系统和产品阶段等方面的内容。
可在本专栏中查阅“自动驾驶功能安全和SOTIF混合分析框架(上):现有体系的局限和解决方案”。
1、自动驾驶HCL模型和方法的开发
通过此专题连载系列的“上”部分,我们已经确定了HCL框架的要求和潜在优势,那么在本文中,我们将注意力转向开发方法。本文的目的是在概念层面上描述完整的自动驾驶汽车HCL框架开发方法。我们将明确方法中的各个步骤,并对每个步骤进行描述。
为了进一步展示标准兼容性,该方法中的步骤以ISO26262生命周期为基础,使用传统的V型开发模型。
V型开发模型的初始阶段是(i)概念阶段、(ii)系统级开发以及(iii)产品开发(包括硬件和软件)阶段。我们的重点将放在前三个阶段,以建立概念性HCL框架。
我们无需了解ISO26262各个阶段的详细信息即可理解该方法。其他系统开发模型,例如敏捷、螺旋和DevOps,通常不包含在当前的自动驾驶汽车安全标准中,并且超出了本文的范围。然而,随着这些模型的安全实践变得更好,HCL框架的集成可能是未来研究的一个领域。
2、ESD分析的概念阶段
下面的图1显示了在ISO26262概念阶段背景下HCL方法的初始步骤,其中白色圆框显示HCL步骤,而灰色框显示与传统ISO26262交付成果的关系。该过程使用熟悉的ISO26262输入:描述功能行为、约束和项目边界的相关项定义和描述、运行和环境条件的运行设计域(ODD)定义。显然,HCL流程满足ISO26262中的HARA和FSC开发步骤,同时还产生兼容的HARA与FSC输出。接下来,我们将依次单独讨论这些步骤,以展示HCL对自动驾驶的应用和必要的调整。
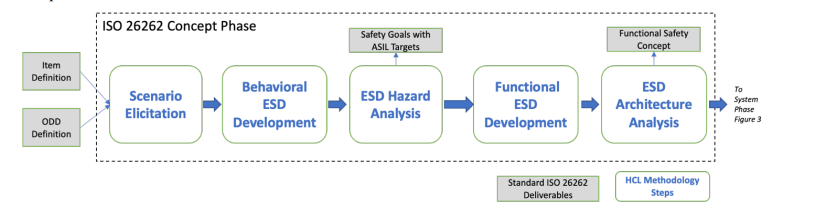
图1:HCL 模型方法论第1部分:ISO26262概念阶段
2 .1 场景发掘
开发一套完整的驾驶场景在很大程度上是一个归纳过程,很难证明其完整性。为了帮助实现完整性,场景启发可以从多种来源中获取,包括但不限于:
•NHTSA碰撞前场景
•监管要求的测试用例
•公司开发的测试和仿真场景(和结果)
•自动驾驶汽车驾驶日志和脱离报告
•ODD的专家分析
•场景和行驶分类文献
•自动驾驶汽车事故报告
•结构化的头脑风暴
可见,简单地采用HCL方法并不能自动解决场景完整性问题,但该方法有望实现(i)减少场景变量,(ii)事故序列的可视化表示(iii)重用ESD中的行为和功能,以及(iv)迭代开发。
然而,改变事件(例如,天气、速度、照明)的概率,但不改变序列结构的参数,要放在BN的条件概率层,而不是ESD层。很明显,这种方法将所需场景排列的总数减少了几个数量级。
同时,ESD格式提供了事故序列的清晰、完整的可视化表示,非专业人员也可以轻松理解甚至构建。ESD中的关键事件可以代表任何类型的不确定事件,包括系统故障、系统决策、场景参与者的存在或场景参与者的行动。与传统的ISO26262 HARA不同,ESD还可以在一张图中直观地表达多种可能的事故序列和最终状态。
ESD形式主义提供了超越传统事件树分析(ETA)的额外功能,让人们相信它能够充分模拟自动驾驶汽车可能遇到的各种场景。简单的ESD可能表面上类似于传统的事件树,但ESD形式扩展了ETA的几个关键特性,包括:
•随机和确定性时间延迟
•时间条件和竞争事件
•物理变量条件
•并发独立序列
•序列同步
•收敛序列和循环过程
有一些例子说明了ESD对航空航天、化学品和无人海洋领域中复杂的动态序列建模的能力。我们相信这些证据,有力证明了ESD形式足以模拟任何自动驾驶汽车场景,但需要更深入的工作,来充分开发自动驾驶汽车的ESD方法。
另外,ESD的简洁、明确的格式还可以识别场景和子场景之间的“等价类”,从而减少模型中的重复。例如,无法检测到自动驾驶汽车前方的车辆,对车辆是停止、减速还是缓慢行驶几乎没有影响。序列的结构基本相同,可以在多个场景中重复使用。
需要注意的是,ESD中采用的细节级别的灵活性,允许使用具有更少、不太详细序列的高级模型获得有价值的结果,然后再用更详细的序列改进ESD。我们通过将ESD开发分为行为ESD(针对HARA)和功能ESD(针对FSC),展示出方法的这种灵活性,也可以修改提议的方法以满足开发过程的需要。
2.2 行为ESD开发
行为ESD是一种高级ESD,它描述了自动驾驶汽车成功驾驭一个场景所必须表现出的顶级行为(或车辆级功能)。此ESD的主要目的是执行基于场景的HARA,以识别安全目标和相关的ASIL目标。
使用关键事件,行为ESD还描述了自动驾驶汽车在场景中可能表现出的高级不当行为。这种分析可以通过行为指南关键词表来辅助。
需要注意的是,这一级别的分析是独立实现的,并且不同于传统的功能分析,例如功能危害分析(FHA)。ESD允许明确映射功能之间的条件关系,从而避免逐个功能分析的限制。例如,一个功能的不当行为可能会创建一个新的子序列,从而触发对其他功能不同的行为需要。
2.3 ESD危害分析
此步骤可能与典型的ISO26262 HARA流程非常相似。ESD中从起始事件(即场景)到危险最终状态的每条“路径”都是HARA中要考虑的一个项目。根据起始事件、关键事件和最终状态的属性,可以估计每条路径的暴露度、可控度和严重度参数。
然后,可以将安全目标与每个项目(即路径)适当地关联起来。与传统的HARA类似,如果安全目标是相同的,则它们可以在场景之间共享。
2.4 功能性ESD开发
在此步骤中,通过将行为分解为功能和子功能,对行为ESD进行了修订和扩展。每个具有安全目标的路径都经过单独分析,以识别潜在的安全障碍和其他关键事件。
虽然,最初的ESD分析纯粹针对行为,但功能ESD旨在获取较低级别的功能行为和不当行为。行为ESD可以同样描述人类或机器的行为(例如,检测行人),但功能性ESD开始设定特定的机器功能(例如,主要感知和备用感知)。而ESD结构则可以通过早期的系统架构来建立。
功能性ESD还可能包括其他场景因素,不仅仅是硬件和软件故障,例如时间延迟、竞争事件和其他可能影响场景结构的随机事件。另外,关键事件可以获取任何结果不确定的事件。具体来说,ESD关键事件还可以获取SOTIF触发事件和缺陷,从而实现功能安全和SOTIF的集成。
2.5 ESD架构分析
在前面的危险分析步骤中,分析了每个ESD中通往危险最终状态的每条路径,从而得出安全目标和ASIL等级。然后,在功能性ESD开发步骤中,对每条路径进行单独分析,从而识别潜在的安全障碍和其他关键事件。
在概念阶段的最后一步,通过评估详细路径,从而确定哪些关键事件将被记入以降低风险,哪些功能将被指定为安全关键。同时,安全关键功能将被分配与顶级安全目标一致的ASIL目标,并将导出功能安全要求。其中,每个功能安全要求对应于功能ESD中的一个关键事件。而在ISO26262术语中,此步骤对应于功能安全概念和ASIL分解。
3、系统和产品阶段
ESD分析完成了生命周期的概念阶段后,在系统级和产品开发阶段,FTA和BN是主要工具。
下面的图2继续显示HCL方法的步骤,这次是在ISO26262系统和产品开发阶段的背景下,格式类似于图1。
我们将依次讨论HCL的每个步骤,从而开发FTA和BN层在自动驾驶汽车环境中的概念应用。
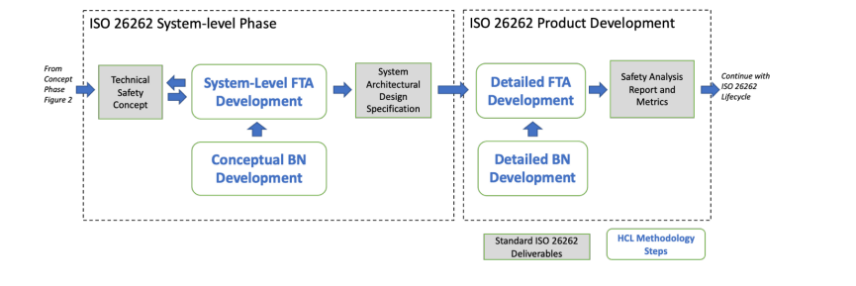
图2:HCL模型方法论第2部分:系统和产品阶段
3.1 系统级FTA开发
系统级FTA开发的过程,与传统ISO26262流程中的情况类似。
前面步骤中的安全目标(SG)和功能安全概念(FSC),为提出技术安全概念(TSC)提供输入,从而实现更高级别的要求。
可见,SG、FSC和TSC一起形成了一个层次化的需求树,构成了初始系统级FTA的结构基础。这种将需求映射到FTA的过程,启动了完善TSC和FTA的迭代过程,而FTA结果向设计团队提供了有关可能需要修订TSC的单点故障、常见原因和潜在故障等问题的反馈。初始系统级FTA具有典型的定性特征,侧重于对系统结构进行建模,并确保一套完整、一致且可行的技术安全要求来实现安全目标。
在HCL环境中开发FTA,其中有一些附加功能,下面将简要概述。首先,每个FTA顶级事件都源自特定运行场景中的特定ESD关键事件。因此,可以在了解确切的运行环境的情况下构建FTA,从而进行更详细和准确的分析。例如,与分析“无法感知车辆”不同,ESD更丰富的上下文,可能会给我们“无法感知在闭塞交叉口从左侧接近的车辆”。显然,更具体的ESD上下文,不仅简化了FTA分析,而且通过仅包括相关变量(如车辆左侧的传感器),便使分析更加准确。
随着FTA的构建,我们还可以寻找事件之间比FTA的AND/OR逻辑更复杂的逻辑关系。
同样,我们可以开始确定通常会被排除在FTA之外的“软”因果因素,例如,接近车辆的速度会同时影响碰撞的严重度和概率。而这些关系和因素,为下一步的BN层提供输入。
集成ESD和FTA层的一个副作用是HCL模型通常包含相对大量的故障树,但每个故障树都较小(仅与故障树的方法相比)。此功能有助于模块化,但可能会导致模型中的一些冗余。在评估大量场景时,ESD关键事件和FTA事件之间存在重复或者差异很小的可能性。幸运的是,可用的HCL软件能够通过传输门和其他功能来处理这种复杂性。
3.2 概念BN开发
此步骤采用上一步中确定的软关系和因果因素,并开始开发定性BN的结构。
根据系统特性和建模需求,这些因果因素可能包括:
•组织因素(安全文化、能力、时间压力等)
•复杂系统行为(ML/AI、卡尔曼滤波器、复杂软件等)
•人为行为(错误、反应等)
•ODD条件(天气、速度、照明、功能等)
在此步骤中,FTA中的基本事件与BN中的影响因素相关联。在某些情况下,如果BN提供了更准确的表示,则可以替换FTA的整个子树。
请注意,由于可用参数数量较多,BN层始终能够生成比FTA更准确的模型,但代价是增加了复杂性。这取决于建模者的判断来确定在哪里进行权衡。
3.3 FTA细化与BN细化
所提出方法的最后一步是开发详细的FTA和BN层。本专题连载首先提出了概念框架的开发,因此这些步骤的细节留给未来工作。有兴趣的朋友,可以添加牛小喀微信:NewCarRen,加入专家社群参与讨论。
更多内容,请关注:“自动驾驶功能安全和SOTIF混合分析框架(下):HCL模型示例及讨论”,关注牛喀网,学习更多汽车科技。
作者:SCCM特邀专家
牛喀网文章,未经授权不得转载!
相关文章



