从虚拟到现实,ADAS系统测试评价技术(一):联合仿真平台搭建
内容提要:本文介绍了利用现有的SiVIC/RTMaps互联平台开发控制应用程序的方法。具有代表性的应用是:以泊车为例进行的低速路径规划。
简 介
在过去的十几年中,人们对ADAS进行了大量的研究。大多数ADAS需要在大规模部署之前进行测试和评估。在这些ADAS中,原型设计和控制阶段的实现都是风险的阶段,不太容易实现。事实上,这种反馈式算法的原型设计和测试需要大量的硬件和软件支持。
为了实现这种主动式系统,还需要开发大量昂贵的嵌入式设备。因此,为了减少时间和风险,在早期的设计阶段,有必要为这些ADAS的开发和评估提供一个非常真实的仿真环境。这种虚拟平台必须提供物理驱动的道路环境、虚拟嵌入式传感器和基于物理的车辆模型。
本文介绍了两个专用平台,它们的高效互连可用于ADAS的原型开发。初步的SiVIC仿真平台是为生成虚拟世界而开发的。为了提高SiVIC的实时原型开发能力,利用RTMaps对该平台进行有效的互连。第二个主要用于多传感器数据处理。与分布式和远程计算机系统架构相比,这种互连只需一台计算机就可以实现。我们将通过自动停车应用说明这种平台的价值。
许多实验室致力于开发和评估高级驾驶辅助系统(ADAS)和部分自主驾驶辅助系统,以提高安全性并降低危险情况的风险。这些辅助系统可以分为几组应用程序:信息应用程序和作动应用程序。对于作动应用程序,来自感知算法的数据与来自本体感知传感器或观测器的数据一起用于计算控制指令。这些指令通过执行器控制车辆动态。控制/指令算法可对车辆进行横向操纵、纵向操纵或横向和纵向耦合操纵。在这些控制器中,可以原型化并开发出一套庞大的ADAS。
要了解这样一个应用程序原型设计和实现的复杂性是非常容易的。几年前,有人开发了一种专门用于车辆、基础设施和传感器仿真的软件体系结构(SIVIC),以支持ADAS上的这些研究活动。该软件能够模拟ADAS中常用的静态或动态装置、设备和车辆中嵌入的多频传感器。在这种情况下,来自感知系统或执行器系统的原始数据被合成数据或设备所替代。这种功能在具有危险物理环境、复杂情况、缺乏数据或故障的场景构建时非常有用。此外,开发的应用程序可以在任何时候进行准确可靠的测试和评估。最初,Sivic平台的构建旨在原型化局部感知应用程序。最近,该传感器仿真平台的扩展已经完成,支持新的控制/命令算法和软件应用的虚拟原型化。
其他模拟器也存在,但它们通常具有不同的视角,并专门用于特定的需求。例如,第一组模拟器是专门用于车辆动力学建模。在这些车辆模拟器中,最著名的可能是免费使用的Racer,它是一个非常逼真和实时的车辆驾驶模拟器。但是Racer并没有集成复杂的传感器建模、类的动态加载、仿真阶段对脚本属性的管理,或者设置参考场景以评估和验证嵌入式算法的能力。此外,我们可以用Oktal的CALLAS、LMS的AMESIM 或IPG的CarMaker和TASS的PreScan。但是,这两种软件要么对于多车辆或者复杂交通工况下的实时ADAS或PADAS原型开发过于复杂,要么场景渲染不够真实。也有一些用于测试巡航控制,防抱死制动系统,牵引控制和稳定控制的其他硬件在环仿真解决方案。其中,我们可以参考用于诊断、测试、更新和验证控制软件的汽车电子控制器单元测试台AutoPlug。此外,奥迪还为基于视觉的ADAS提供了一个硬件在环系统。最后一个模拟器主要集中在光学模拟上。但这项工作提出了一个有趣的方法来构建场景。
还许多其他模拟器专门用于驾驶员的行为建模或道路交通仿真。这就是SIM2, ARCHISIM, VISSIM, AIMSUN, SUMO 和 SCANeR 模拟器的应用。在模拟的交通模型级别比较,第二类模拟器没有一种简单的方法可以集成和评估ADAS,例如紧急制动、带有真实嵌入式传感器的横向或纵向控制系统。
本文介绍了利用现有的SiVIC/RTMaps互联平台开发控制应用程序的方法。具有代表性的应用是:以泊车为例进行的低速路径规划。此外,环境模拟还为在车辆中安装执行器和传感器的实现提供了指导,以便向算法传输可靠和及时的信息。
接下来,我们将先为大家介绍传感器和车辆仿真平台,依次是SIVIC和RTMAPs,最后介绍用两个平台的联合来获得我们所需的ADAS原型环境。
ADAS原型的虚拟替代解决方案
A.SIVIC平台
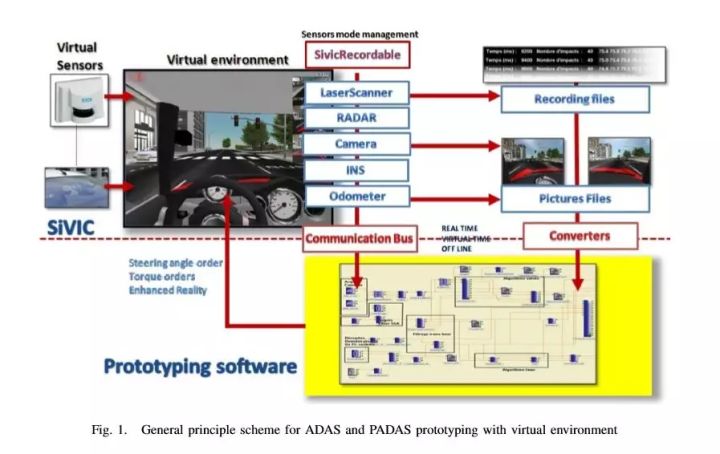
许多开发项目旨在通过驾驶辅助系统提高道路环境的安全性。这些研究通常考虑到自车车辆感知和车辆的相应反应。然而,在许多情况下,自我感知不充分。需要更多的信息来降低风险并最大限度地提高驾驶安全性。这些额外的信息需要额外的资源,这些资源既耗时又昂贵。因此,在系统设计的早期阶段,必须有一个模拟环境,允许对扩展的、丰富的和协作的驾驶辅助系统进行原型设计和评估。根据物理定律,虚拟仿真平台必须集成道路环境模型、虚拟嵌入式传感器、基础设施和通信设备的传感器。同时,建立基于物理的车辆动力学模型,并将其与执行器耦合。SIVIC满足这些要求,因此是一个非常有效的工具,可以开发具有协作和扩展环境感知的高级自主驾驶系统及其原型(如Fig1)。实际上,SIVIC软件平台为快速设计带来了真正的好处。此外,它还为V2V和V2I应用程序等协作系统的开发以及此类系统的性能和可靠性评估提供了宝贵的支持。
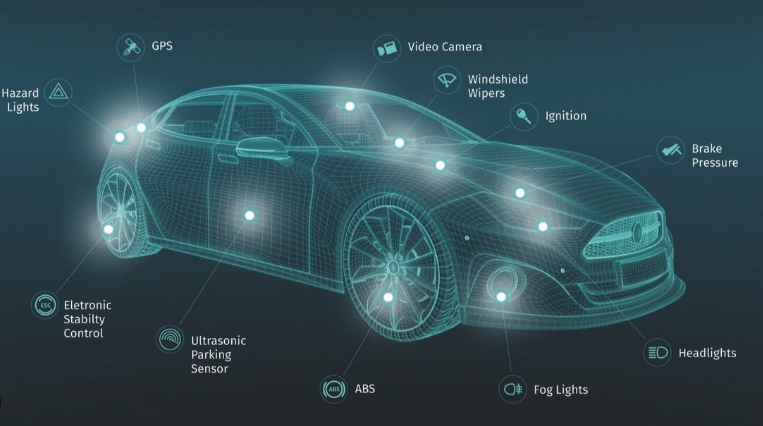
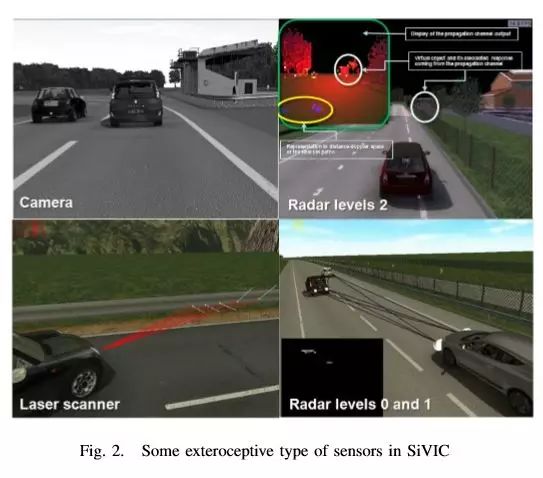
在目前的状态下,该平台包括几种类型的外部感知和本体感知传感器,从而构成了通信媒介。外部感知传感器主要是照相机、激光和毫米波雷达。本体感知传感器包括里程表和惯性导航系统,协同系统的通信源包括802.11p通信介质和信标,照相机传感器采用三个不同的层次进行建模,第三个层次考虑了真实摄像机的实际物理过程以及一组后处理的滤波器。激光雷达有两种模式:光线跟踪和深度缓冲。雷达考虑了4个层次的建模:第一个层次没有传播信道,扩展了深度缓冲功能,第二个层次有基于多重反射光线跟踪机制的RCS和传播信道。第三层是真实的能量传播和一些图像空间进行的专门处理(在GPU上进行处理),最后一层是使用具有GPU和CUDA功能的密集的并行计算机制。通信由两个级别建模。第一级是从真实的802.11p通信实验中获得的统计模型。第二级是基于雷达传播信道的自适应和与NS3库的耦合。对于所有这些传感器和媒介,可以在实时和模拟阶段调整和确定采样频率以及内、外参数。此外,还提供了几种操作模式,并可在模拟过程中进行修改: Off 和 On 用于打开或关闭传感器。Record 用于在文件中收集数据, RTMaps、DDS 和Matlab 用于在外部应用程序中发送传感器数据。SiVIC特别为同时管理用于ADAS原型的大量不同类型的传感器而构建。
B.RTMAPS平台
RTMAPS是由B.Steux 在Mines Paristech开发的产品。现在由英特尔公司出售。该平台是为实时、多传感器、高级原型设计而开发的。其主要目标是管理和处理大量原始数据流,如图像、激光扫描仪、GPS、里程计和INS原始数据。这些算法可以应用于传感器数据,涉及到几种专用的图像处理和多传感器融合库。一旦这些数据被记录和处理,就很容易回放它们。这种架构为嵌入式ADAS系统信息输出或指令提供了一个强大的工具。在每个阶段,传感器数据和模块输出都有时间戳,以实现准确可靠的时间管理。
C.SiVIC/RTMAPS:高效ADAS原型开发平台
SiVIC与RTMaps的联合使RTMaps能够用模拟数据替换真实数据。此外,这些互联平台为控制/命令和感知算法的高级原型设计和验证提供了一个坚实的框架。事实上,这种完全有效的耦合允许开发SIL应用程序,包括带有本体感知和外部感知嵌入式传感器的车辆虚拟原型。将SiVIC中建模的车辆和传感器的实时虚拟数据发送到RTMaps。在RTMaps平台中,这些数据可以用作感知算法和控制/命令模块的输入。同样,可以将指令从RTMAP发送到Sivic中使用的虚拟车辆,以便对其进行控制。这种设计链是非常有效的,因为RTMAP中开发的算法可以直接传输到实际硬件设备。因此,可以认为仿真模型非常接近现实(真实车辆、真实传感器),该互联库处理的不同类型的数据如图所示。这些不同类型的数据传输的比较结果如图所示,最好的解决方案显然是优化的FIFO方法,它允许在短时间内传输大量数据。
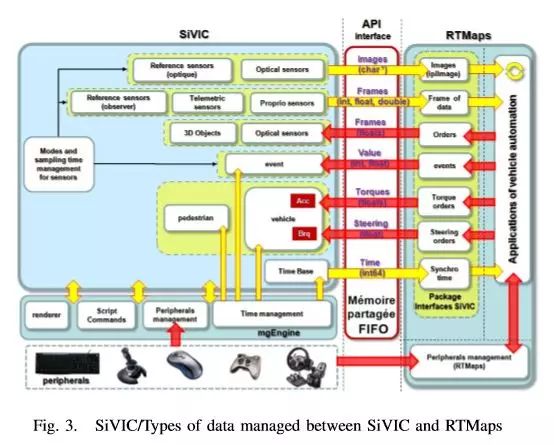
已经实施并测试了几种机制。 这些不同类型的数据传输的比较结果在图中给出。 最好的解决方案显然是优化的FIFO方法,它允许在短时间内传输大量数据。 这是一个非常关键的功能,以保证SiVIC和感知/数据处理/控制算法之间的实时链接。
为了保证SIVIC与感知/数据处理/控制算法之间的实时链接,它是一个非常关键的功能。为了正确管理时间,还设计了一个同步模块。此同步允许提供从SiVIC到RTMaps的时间参照。然后,RTMaps与SiVIC组件(车辆、行人和传感器)完全同步。SiVIC/RTMaps仿真平台还可以构建参考场景,并允许对控制/命令和感知算法进行评估和测试。事实上,SiVIC/RTMaps平台构成了一个完整的仿真环境,因为它提供了在实际车辆上发现的相同类型的交互作用:车轮角度、加速度、刹车等。
本篇到此结束,下一篇我们将会以自动泊车为实例来介绍路径规划应用程序和控制算法。更多干货不可错过!
作者:牛小喀
牛喀网文章,未经授权不得转载!
相关文章