从虚拟到现实,ADAS系统测试评价技术(二):自动泊车系统评价
内容提要:我们将以一个平行侧方停车工况下的低速自动化实例来详细说明路径规划应用程序和跟踪控制算法的仿真验证。
回 顾
上一篇我们介绍了联合仿真平台【从虚拟到现实,ADAS系统测试评价技术(一):联合仿真平台搭建】,在本篇中,我们将以一个平行侧方停车工况下的低速自动化实例来详细说明路径规划应用程序和跟踪控制算法的仿真验证。就目前国内外解决侧方停车的方法而言,常见的策略为路径规划加跟踪控制。
案例:自动泊车应用
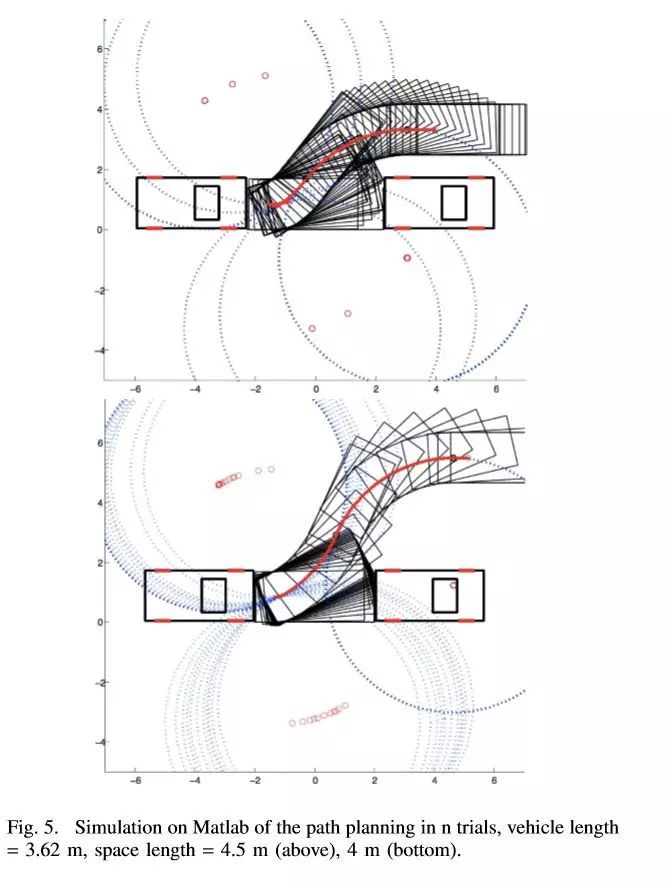
首先,我们用matlab仿真了n次模拟停车的整个路径规划策略。下图为其中两个试验的示例,我们将泊车轨迹改变一次方向称为泊车的“一步”,由此把泊车过程分为若干步。图中显示了泊车过程中的运动轨迹以及每一步的瞬时圆弧。
第一个是泊车3次的试验结果,第二个是泊车66次的试验结果(这是人类驾驶试验无法达到的次数)。由图可知,在车辆与泊车位置平行的情况下,我们的方法完全与车辆的初始位置无关。
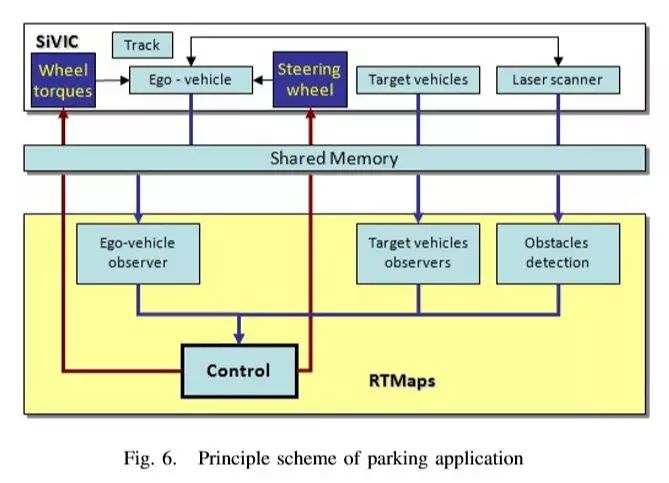
在SiVIC平台上很容易实现相关的算法。车辆与前后障碍物(比如前后已停放的车辆)的距离计算,是由Car Observer或一组短程激光扫描仪(类似超声波传感器)来测量的。使用共享内存机制或DDS总线在Rtmap中发送这些数据。在SiVIC中,将待停车辆设置为“RTMaps模式”,使其能够在RTMaps平台上进行控制。一旦检测到空闲的泊车位置有足够的空间,则控制器可以向待停车辆发送命令以执行泊车操作。值得一提的是,在这个“软件在环”架构中,RTMaps平台中开发的算法,与真正的嵌入式架构中使用的算法是相同的。图6和图7分别展示了SiVIC平台和Rtmap平台的总体架构及其应用。

结 论
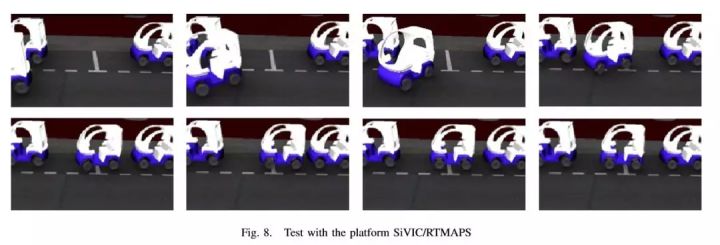
在实车测试进行之前,我们利用SiVIC/RTMaps平台对算法进行了测试。在已知停车位的位置、空间大小,以及车辆位置的情况下,利用算法可以规划出一条路径,然后我们可以用一个非常简单的控制技术使车辆跟随路径实现泊车。
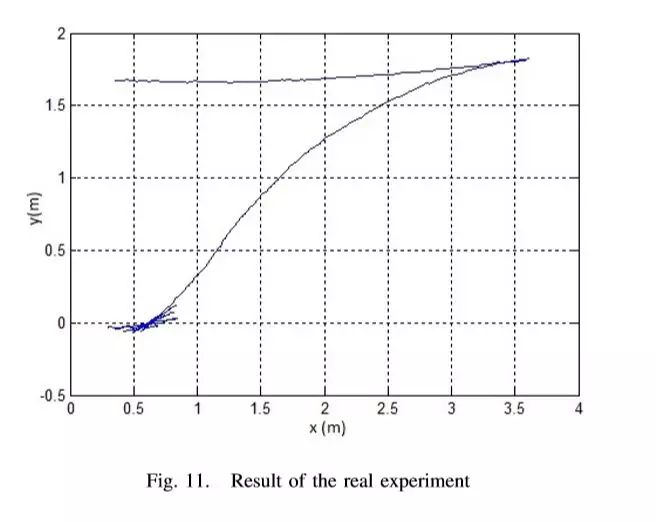
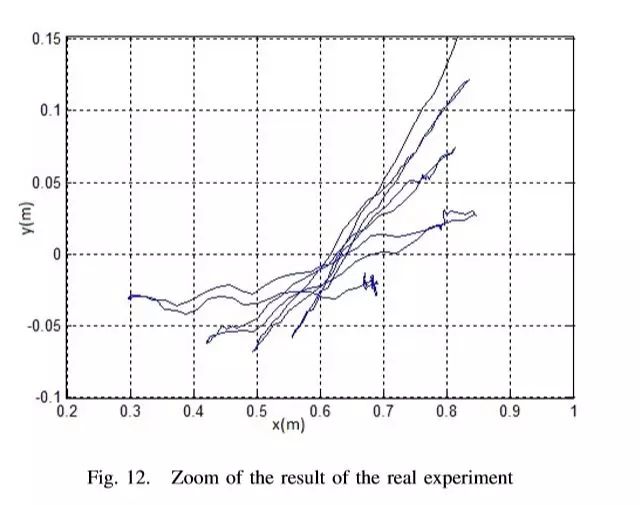
下图为利用SiVIC平台和RTMaps开发的控制器进行自动泊车的结果。
接下来,为了验证我们的通用泊车算法在实际情况下是否适用,我们测试了一台名为Cycab的电动车。Cycab来自于法国实验室IMARA(IN-RIA),仅有有2个座位,配备4个马达(每个车轮配有1个马达)、两个转向柱塞(前轮和后轮皆可转向)和多个传感器,并具有计算和通信的能力。该车的设计就是专门用来试验和小规模演示的。
如图9所示为Cycab
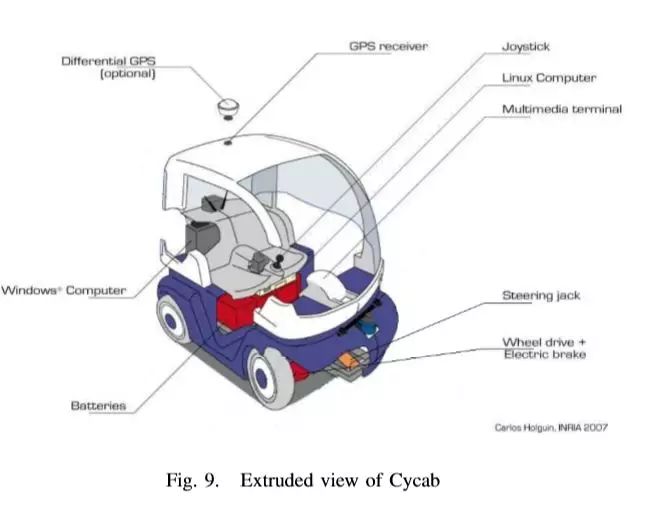
车辆的最高速度为5 [m/s] (20 km/h]),但在实际操作中,车辆的速度要低得多,为1 [m/s](相当于步行的行人)。
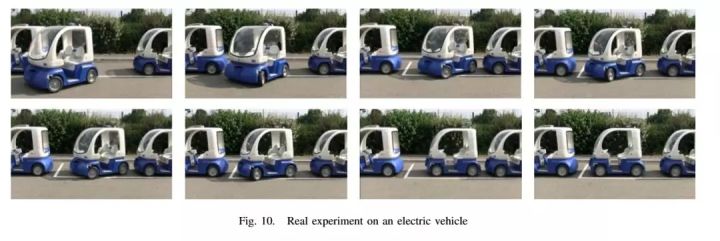
在该测试中,使用DGPS接收器获取车辆和泊车位的精准位置,我们应用了与在仿真平台上测试时一样的控制技术。本实验的一些采样场景表明,我们的路径规划算法可以在多次试验中停泊真实车辆,如图10所示。实验结果如图11和图12所示。
总结和未来计划
在本篇文章中,我们介绍了通用仿真平台—SiVIC,SiVIC可以对传感器、车辆和基础设施进行建模,以便进行原型设计,测试和评价控制/命令算法。以目前的开发环境来看,SiVIC可以为仿真测试提供很多功能,可以对各种先进传感器进行建模和测试。SiVIC可以以最真实的方式再现ADAS车辆的实际运行情况,还可以嵌入车内传感器的行为数据。凭借其图形能力,SiVIC可以测试、评价感知和控制算法。这个功能是SiVIC这个平台最重要的优点之一。
在极端条件下实时测试评价环境感知,以及车辆控制几乎是不可能的,而SiVIC平台的创新方法使其成为可能。现有的很多仿真平台,将大量的精力用于特定的传感器或特定的动态对象建模。相比之下,本文所提出的SiVIC平台提供了大量的实时功能,以便将新的嵌入式应用程序轻松地原型化。
并且,车辆模型的复杂度足以接近实际条件下的车辆应用开发。为了管理和优化计算资源,还可以使用分布式数据存储机制,以便多个应用程序在一台计算机上共享计算资源,或者在多个计算机上并行多个应用程序。
该机制对于处理非常复杂的车辆模型,复杂的虚拟环境和复杂的传感器建模非常有用。此外,SiVIC与RTMaps平台的耦合使RTMaps能够通过仿真数据替换实际数据。此外,它还支持在RTMaps中从桌面打开控制/命令算法原型的视角。因为SiVIC用的是物理汽车模型,原型设计的第一阶段不再需要装备实际车辆。事实上,SiVIC-RTMaps平台构成了一个完整的仿真环境,因为它提供了与真实车辆相同的交互:例如车轮转动角度、加速度、制动等等。
另外,越来越多的ADAS应用需要预测工况以便能够对危险情景及时的反应。这种情况下,控制逻辑需要基于延伸的或者协作的环境感知能力。SiVIC中将会配置额外的协作传感器,对于这些传感器,我们可以通过通信设备获取,比如WiMax,WiFi802.11p...
作者:牛小喀
牛喀网文章,未经授权不得转载!
相关文章